Motoraggregat frekvensstyrd, Profibus/dp PPO3
BaseFcPPO3MotorAggr objektet hanterar en motor som styrs av en frekvensomriktare via fältbussen
Profibus/dp genom att kommunicera med standard PPO3 protokollet. En huvudkontaktor (elkraft) kan
också ingå/styras från objektet. PPO3 protokollet är begränsad att visa processvärden, endast
hastigheten (oftast varvtal) kan läsas av och ingen parametrering kan göras under drift. Önskar
man mer funktionalitet bör man använda BaseFcPPO5MotorAggr objektet istället.
Aggregatet kan konfigureras med många olika kringkomponenter och körsätten Auto/Man/Lokal mod
som också har många olika inställningsalternativ.
Möjliga komponenter förutom motorn och frekvensomriktare:
- Effektbrytare (MCCB)
- Kontaktor
- Säkerhetsbrytare i huvudkrets eller starspärr i manöverkrets
- Säkring
Kontaktorn kan konfigureras med två utgångar om pulsmanöver start/stopp önskas. Se klasshjälp
om BaseContactor där info om pulsstyrning tas upp utförligare och speciellt exempel 3 under
rubrik "Exempel styrsätt" som visar principen hur kontaktorn i detta aggregat fungerar vid
pulsstyrning.
Knappar i objektsbilden kan göras osynlig genom att konfigurera attribut i inbyggda
CompModeA objektet, se CompModeA objektet för mer info. OBS! Att tillhörande objektsbilder
för aggregatet inte stödjer CompModeA olika texter på knappar start/stopp, dvs dessa
knappar kan endast visa texten start/stopp och ej Till/Från.
Motor i objektsbilden kan konfigureras med temperaturövervakning. Se BaseMotor objektet
för mer info. OBS! Att tillhörande objektsbilder för aggregatet inte stödjer visning av
BaseMotorns olika temperaturövervakningsalternativ, dvs tempsensor/switch syns inte i bild.
Om man vill styra en fläkt eller pump bör man välja BaseFcPPO3PumpAggr eller BaseFcPPO3FanAggr
objekten istället som har anpassade objektsymboler för dessa drifter.
Objektsymbol
Grafiska symbolen för detta objekt är BaseComponent/FcPPO3MotorAggr.

Dynamik för symbolen:
- Grön när motorn är startad (originalfärgen går att ändra).
- Grå när motorn är redo men ej startad.
- Gul färg när det är varning (säkerhetsbrytare från eller aggregatet förreglad mm).
- Röd färg när det är fel (effektbrytare utlöst mm).
Aktuell mod visas med bokstäver:
M Manuell mod
L Lokal mod
LM Lokal och Manuell mod
Ingen bokstavsindikering betyder att objektet är i automatik mod (externt styrd).
Objektets metoder (menyval) öppnas med höger musknapp.
Objektsbild
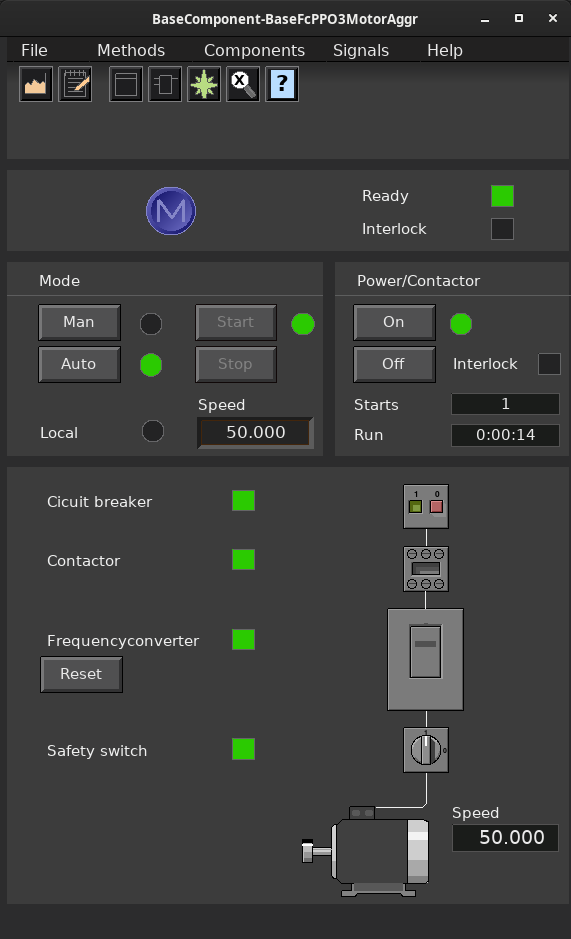
Indikatorer:
- Ready indikatorn är grön när motorn kan startas.
- Interlock indikatorn bredvid objektsymbolen är röd när motorn är förreglad att starta,
objektsymbol blir gul.
- Start indikatorn bredvid startknappen är grön när driften körs (run).
- Lokal mod indikatorn visar gult när lokal styrning pågår. Start, stopp knappar
dimmas. Styrning via Auto/man mod förreglas.
- Extern indikatorn som kan ses i denna bild (ej nu) visar "mod status" när auto/man mod
inte styrs/används i objektet. Inga auto/man knappar visas i bilden.
- Contactor och indikator bredvid knapp On är grön när kontaktorn är dragen. dvs om
driftsvar/feedback är konfigurerat annars är det tillsignal (Do) som styr färgen.
- Contactor interlock indikatorn är röd när yttre elkraft-förregling är aktiv, knappar
för elkraften och start/stopp dimmas, objektsymbol blir gul.
- Frequencyconverter indikatorn är grön när omriktaren är redo att köras, annars gul.
Trippar omriktaren blir den röd. Blinkar grön vid uppstart (elkraft till).
- Safety switch är grön när säkerhetsbrytaren är tillslagen och gul om frånslagen.
(rött hänglås visas när brytaren är frånslagen)
Övriga indikatorer är normalt gröna men vid fel blir de röda.
Visningsfält Starts visar antalet gånger som driften har startats och Run visar total tiden
driften har varit igång (dagar timmar:minuter:sekunder).
Knappar:
- Knappar Auto/Man växlar mod i fjärrstyrning och Start/stoppknappar används för att
manuellt styra driften i fjärrstyrning (från bild, ej lokalt vid driften).
- Knappen Start har toggelfunktion, dvs man behöver ej trycka på stopp.
- Knappar Man/Auto väljer mod vid fjärrstyrning
- Dimmade Start och Stopp knappar betyder att auto mod gäller (Extern indikator grön).
- Syns inga knappar alls är ALLTID Extern indikator grön och auto/man bör visas på
annat sätt.
Exempel
Bilden visar när auto/man mod styrs av ingång ExtControl i funktionsobjektet. Auto mod
aktiveras genom att sätta ingång ExtControl till 1 (knappar start/stopp dimmas) och styr
sedan frekvensomriktaren via ingång ExtStart.
Denna konfiguration/bild utan auto/man knappar fås genom att konfigurerad aggregatet CbCoFcSl och
via det inbyggda modobjektet CompModeA sätta OpExtAndIntMan till 1.
OBS! Att startspärren som används egentligen är en komponent av typen säkerhetsbrytare (BaseSafetSwitch),
dvs det är bara objektbilder som skiljer sig åt när man använder startspärr eller säkerhetsbrytare.
Konfigurering
BaseFcPPO3MotorAggr objektet hanterar 24 olika alternativ beroende på den elektriska utformningen:
- Circuitbreaker Effektbrytare (MCCB)
- Contactor Kontaktor
- Frequencyconverter Frekvensomriktare
- Safetyswitch Säkerhetsbrytare, arbetsbrytare (BaseSafetySwitch)
- Startlock Startspärr, arbetsbrytare (BaseSafetySwitch)
- Fuse Säkring (snabba!)
1 CbCoFcSs Circuitbreaker, contactor, frequencyconverter and safetyswitch.
2 CbCoFcSl Circuitbreaker, contactor, frequencyconverter and startlock.
3 CbCoFc Circuitbreaker, contactor and frequencyconverter.
4 CbFcSs Circuitbreaker, frequencyconverter and safetyswitch.
5 CbFcSl Circuitbreaker, frequencyconverter and startlock.
6 CbFc Circuitbreaker and frequencyconverter.
7 CoFcSs Contactor, frequencyconverter and safetyswitch.
8 CoFcSl Contactor, frequencyconverter and startlock.
9 CoFc Contactor and frequencyconverter.
10 FcSs Frequencyconverter and safetyswitch.
11 FcSl Frequencyconverter and startlock.
12 Fc Frequencyconverter.
13 FuCbCoFcSs Fuse, circuitbreaker, contactor, frequencyconverter and safetyswitch.
14 FuCbCoFcSl Fuse, circuitbreaker, contactor, frequencyconverter and startlock.
15 FuCbCoFc Fuse, circuitbreaker, contactor and frequencyconverter.
16 FuCbFcSs Fuse, circuitbreaker, frequencyconverter and safetyswitch.
17 FuCbFcSl Fuse, circuitbreaker, frequencyconverter and startlock.
18 FuCbFc Fuse, circuitbreaker and frequencyconverter.
19 FuCoFcSs Fuse, contactor, frequencyconverter and safetyswitch.
20 FuCoFcSl Fuse, contactor, frequencyconverter and startlock.
21 FuCoFc Fuse, contactor and frequencyconverter.
22 FuFcSs Fuse, Frequencyconverter and safetyswitch.
23 FuFcSl Fuse, Frequencyconverter and startlock.
24 FuFc Fuse, Frequencyconverter.
OBS! Motorn kan konfigureras med temperaturövervakning (tempswitch, Tempsensor)via
"ConfigureComponent" metoden via inbyggda motorobjektet BaseMotor.
OBS! Använder man temperaturövervakning i motorobjektet ska man vara medveten att denna
förregling kopplas bort om funktionsobjektets ingången DisableSup [dis] är 1, dvs motorn
kan starta även vid hög temp!
Inmatningsfält Speed (OpRefMan i CompModeA) max och min värde som operatör kan mata in i
objektsbilden styrs av attribut OpMinRefMan och OpMaxRefMan i inbyggda objektet CompModeA.
Enheten/texten för Speed värdet man skriver in kan visas/ändras, dvs det är texten i
inbyggda objektet BaseFcPPO3 attribut ActSpeed.Unit som visas i bilden.
Signaler
Objektet innehåller signaler som ska kopplas till I/O kanaler.
- CircuitBreaker.NotTripped Di (valbart via Disable)
- SafetySwitch.On Di (valbart via Disable)
- Contactor.Order Do (valbart via "ConfigureComponent" metoden)
- Contactor.OrderOff Do (valbart via "ConfigureComponent" metoden val TwoOrderFeedback)
- Contactor.Feedback Di (valbart via "ConfigureComponent" metoden)
- Motor.TempSwich.Switch Di (valbart via "ConfigureComponent" metoden)
- Motor.TempSensor.Value Ai (valbart via "ConfigureComponent" metoden)
Ska en ingång inverteras för rätt funktion får man ändra attributet "InvMask" på
kanal/kortobjektet för Di signalen.
OBS! Att göra Disable på en IO signal/komponent innebär att man kan få en felaktig
objektsbild och därför ska man bara konfigurera/Disable komponenter via
"ConfigureComponent" metoden för hela aggregatet.
Valet där kontaktorn har två styrutgångar med pulsfunktion (TwoOrderFeedback) används
när en kontaktor har självhållning. Se klasshjälp om BaseContactor för mer info.
Mod
Dom olika moder Auto/Manuell/lokal som kan förekomma hanteras utav mod objektet
CompModeA.
OBS! Med lokal mod menas INTE omriktarens lokala mod utan avser lokal manöverlåda
vid driften/motor om sådan finns.
Modfunktion:
-Felhantering för manövrering (5 larm).
-Dimmar knappar i objektsbild så felmanövrering undviks.
Körsätt som kan konfigureras:
1 Fjärr mod auto/man Driftens auto/manuell mod styrs av knappar i bilden.
2 Fjärr mod extern Driftens auto/manuell mod styrs av "extern" funktion via PLC programmet
3 Fjärr mod extern Driften styrs som 2, men knappar Start/Stopp kan användas i objektsbilden.
4 Intern mod Driften styrs endast men knappar Start/Stopp i objektsbilden.
5 Lokal mod Driften styrs via manöverlåda placerad lokalt vid driften.
Körsätt enligt ovan: (attributen ligger i inbyggda CompModeA objektet)
1 Är grundinställningen (default).
2 Inga knappar i bild fås genom att sätta attribut OpExtOnly till 1.
3 Är som 2, men Start/Stopp knappar är kvar i bilden, fås genom att sätta attribut OpExtAndIntMan till 1.
4 Fås genom att sätta attribut OpIntOnly till 1.
5 Hanteras via funktionsobjektets ingång Local, kan konfiguras bort genom att sätta attribut OpNoLocal till 1.
OBS! Endast en åt gången av dessa tre inställningsattribut i CompModeA får ha värdet 1, Är flera
satta till 1 samtidigt fungerar inte objektet som tänkt:
-OpExtAndIntMan
-OpIntOnly
-OpExtOnly
Se objekt CompModeA för mer info om hur man konfiguerar moder.
OBS! Konfiguerar man CompModeA för extern styrning (inga knappar auto/man) och vid lokal
körning bör man använda aggregatets funktionsobjektsutgång Error [err] för att ta ner
styrorder så att oönskade återstarter förhindras vid/efter fel.
Övervakning och felhantering
Aggregatet innehåller en hel del övervakning och larm. Varje komponent har oftast en larmtext
som kan ändras, se hjälpen för de inbyggda objekten för mer info.
Försöker man påverka objektets olika moder mm och förreglingar är aktiva som ska hindra
felmanövrering utgår diverse larm.
Objektets auto/man mod går över i MAN mod om elkraften försvinner, säkerhetsbrytare frånslagen,
skydd löser ut eller omriktaren inte är driftklar för fjärrstyrning, detta för att förhindra oönskade
återstarter. Denna funktion går att koppla bort via inbyggda CompModeA objektets inställningsattribut
OpNoAutoToMan.
Ingången PowerInterlock [pil] på funktionsobjektet förreglar manövrering av huvudkontaktorn från
bild (knappar dimmas).
Ingången ExtInterlock [ilk] på funktionsobjektet förreglar startorder till omriktaren, knappar
Start/Stopp dimmas.
Om ingången PowerInterlock [pil] eller ExtInterlock [ilk] på funktionsobjektet är hög förreglas
startorder till frekvensomriktare och detta gäller i alla moder. Det normala beteendet när dessa
ingångar går höga är att tvinga objektet i manuell mod, vill man ligga kvar i auto mod oavsett
dessa ingångar kan man konfigurera detta genom att sätta attributet OpNoAutoToMan till 1 i inbyggda
objektet CompModeA.
OBS! Om inställningsattributet OpNoAutoToMan är satt till 1 är det programmerarens uppgift att
använda funktionsobjektets utgång Error [err] för att ta ner styrorder på ingång ExtStart [est]
alternativt ta ner ExtControl [eco] om denna används, detta för att förhindra oönskade återstarter
vid fel.
OBS! Används lokal mod ska man ta ner manuell styrorder på funktionsobjektets ingång LocalStart
[lst] för att förhindra oönskade återstarter vid fel, dvs använd funktionsobjektets utgång Error
[err] för detta ändamål, se exempel nedan.
Exempel felhanteringskod
Bilden visar ett kodexempel när utgången err i funktionsobjektet används för att återställ lokal
start, återställningskoden är gulmarkerad i bilden. OBS! Att kodexemplet är ifrån ett BaseMotorAggr
objekt, men principen är densamma för BaseFcPPO3MotorAggr.
Lokala manöverlådan innehåller en start-tryckknapp DI24.Ch19, stopp-tryckknapp DI24.Ch20 och en
omkopplare med två lägen, DI24.Ch10 för fjärrstyrningsläget och Di24.Ch11 för lokalläget.
Err utgången påverkar en Dv "Driftklar" som i sin tur återställer den lokala starten SR_R
vippa LokStart. Denna kod förhindrar oavsiktlig start från yttre logik efter ett fel i objektet,
exempelvis utlöst motorskydd.
OBS! Att denna återställningsfunktion är programmerarens uppgift att koda, dvs utgången err är
till för det. Om Auto/Man mod är konfigurerad att styras utanför objektet (ingångar eco, est) bör
man också ta hänsyn till err utgången för att förhindra oavsiktlig start efter fel.
Plc kod
För PLC programmering används funktionsobjektet BaseFcPPO3MotorAggrFo.
Skapa ett funktionsobjekt i PLC editorn och koppla till objektet i planthierarkin.
Startorder (via kontrollord ControllWordCW) och analoga referensutgång (RefSpeed) via Profibus till
omriktaren styrs av fyra olika körsätt:
1 Ingång ExtStart [est] från funktionsobjektet och intern auto/man mod.
2 Ingång ExtStart [est] från funktionsobjektet och extern auto/man mod [eco].
3 Knappar Start/stopp från objektsbilden i manuell mod.
4 Ingång LokalStart [lst]från funktionsobjektet och LocalMode [loc].
Analoga styrreferensen tas ifrån ingång RefSpeedExt [REX] i auto/extern mod, ingång RefSpeedLoc
[RLO] i lokal mod eller internt via bild (OpRefMan) i man mod. Objektet rampar INTE signalen på
något sätt och om/när startorder tas ner nollas analoga referensen direkt.
Simulering
För simulering använder man funktionsobjektet BaseFcPPO3MotorAggrSim.
Profibus/dp
För frekvensomriktarens Profibus/dp kommunikation med protokollet PPO3 ska man använda modulobjektet
BaseFcPPO3PbModule. Se klasshjälp för BaseFcPPO3PbModule objektet där en utförligare beskrivning hur
man skapar ett modulobjekt i nodehierarkin och konfigurerar profibus för en frekvensomriktare.
Koppla därefter modulen till aggregatets inbyggda objekt BaseFcPPO3 (FrequencyConverter) med hjälp
av IOconnect funktionen.
INSTÄLLNINGAR PPO3:
PPO3 protokollets data kallas för PZD (prozessdaten). Anpassning/skalning mellan Proview och
omriktarens IO signaler måste också göras i objekt/profibusmodul BaseFcPPO3PbModule kanalobjekten
ChanAi och ChanAo för aggregatet, signaler som bör gås igenom är:
-O_REF Referens (börvärde i varvtal är att föredra)
-I_ACT Ärvärde (varvtalsvärde är att föredra)
Inbyggda BaseFcPPO3 frekvensomriktarobjektets Ao signal RefSpeed attribut PresMaxLimit och
PresMinLimit anger objektsbildens speed-grafens visningsområde. Dessa går att ändra under drift
genom att klicka på grafen.
Se objekt BaseFcPPO3PbModule för mer info och exempel.
Se även
| Template Object |
| AlarmToOften.DetectOn |
1 |
| AlarmToOften.DetectText |
Power not yet ready for restart, wait before retry |
| AlarmToOften.EventType |
64 |
| AlarmToOften.EventPriority |
66 |
| AlarmToOften.EventFlags |
7 |
| AlarmToOften.MoreText |
|
| AlarmToOften.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| AlarmToOften.CtrlPosition |
1 |
| AlarmToOften.LockAttribute |
1 |
| AlarmPowOnNotOk.DetectOn |
1 |
| AlarmPowOnNotOk.DetectText |
Power interlocked |
| AlarmPowOnNotOk.EventType |
64 |
| AlarmPowOnNotOk.EventPriority |
66 |
| AlarmPowOnNotOk.EventFlags |
7 |
| AlarmPowOnNotOk.MoreText |
|
| AlarmPowOnNotOk.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| AlarmPowOnNotOk.CtrlPosition |
1 |
| AlarmPowOnNotOk.LockAttribute |
1 |
| AlarmStartNotOk.DetectOn |
1 |
| AlarmStartNotOk.DetectText |
Power is not on |
| AlarmStartNotOk.EventType |
64 |
| AlarmStartNotOk.EventPriority |
66 |
| AlarmStartNotOk.EventFlags |
7 |
| AlarmStartNotOk.MoreText |
|
| AlarmStartNotOk.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| AlarmStartNotOk.CtrlPosition |
1 |
| AlarmStartNotOk.LockAttribute |
1 |
| CircuitBreaker.Alarm.DetectOn |
1 |
| CircuitBreaker.Alarm.DetectText |
Circuit breaker tripped |
| CircuitBreaker.Alarm.EventType |
64 |
| CircuitBreaker.Alarm.EventPriority |
67 |
| CircuitBreaker.Alarm.EventFlags |
7 |
| CircuitBreaker.Alarm.MoreText |
|
| CircuitBreaker.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.CircuitBreaker |
| CircuitBreaker.Alarm.CtrlPosition |
1 |
| CircuitBreaker.Alarm.LockAttribute |
1 |
| Contactor.DisableOffControl |
1 |
| Contactor.FbTimeLimit |
1.000000e+00 |
| Contactor.Alarm.DetectOn |
1 |
| Contactor.Alarm.DetectText |
Contactor feedback lost |
| Contactor.Alarm.EventType |
64 |
| Contactor.Alarm.EventPriority |
67 |
| Contactor.Alarm.EventFlags |
7 |
| Contactor.Alarm.MoreText |
|
| Contactor.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Contactor |
| Contactor.Alarm.CtrlPosition |
1 |
| Contactor.Alarm.LockAttribute |
1 |
| FrequencyConverter.Description |
Frequency Converter |
| FrequencyConverter.Specification |
Frequency converter PPO3 protocol |
| FrequencyConverter.StatusWordSW.Description |
Status Word, from converter |
| FrequencyConverter.StatusWordSW.SigChanCon |
$IoConnect:BaseComponent-Class-BaseFcPPO3IoModule.I_SW |
| FrequencyConverter.ActSpeed.Description |
Actual Value, from converter |
| FrequencyConverter.ActSpeed.SigChanCon |
$IoConnect:BaseComponent-Class-BaseFcPPO3IoModule.I_ACT |
| FrequencyConverter.ActSpeed.PresMaxLimit |
1.000000e+02 |
| FrequencyConverter.ControlWordCW.Description |
Control Word, to converter |
| FrequencyConverter.ControlWordCW.SigChanCon |
$IoConnect:BaseComponent-Class-BaseFcPPO3IoModule.O_CW |
| FrequencyConverter.RefSpeed.Description |
Reference Value, to converter |
| FrequencyConverter.RefSpeed.SigChanCon |
$IoConnect:BaseComponent-Class-BaseFcPPO3IoModule.O_REF |
| FrequencyConverter.RefSpeed.PresMaxLimit |
1.000000e+02 |
| FrequencyConverter.PowerUpTime |
1.500000e+01 |
| FrequencyConverter.AlarmLocalMod.DetectOn |
1 |
| FrequencyConverter.AlarmLocalMod.DetectText |
Frequency converter is in local mode |
| FrequencyConverter.AlarmLocalMod.EventType |
64 |
| FrequencyConverter.AlarmLocalMod.EventPriority |
66 |
| FrequencyConverter.AlarmLocalMod.EventFlags |
7 |
| FrequencyConverter.AlarmLocalMod.MoreText |
|
| FrequencyConverter.AlarmLocalMod.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter |
| FrequencyConverter.AlarmLocalMod.CtrlPosition |
1 |
| FrequencyConverter.AlarmLocalMod.TimerTime |
3.000000e+00 |
| FrequencyConverter.AlarmLocalMod.LockAttribute |
1 |
| FrequencyConverter.AlarmTripped.DetectOn |
1 |
| FrequencyConverter.AlarmTripped.DetectText |
Frequency converter tripped, reset is required |
| FrequencyConverter.AlarmTripped.EventType |
64 |
| FrequencyConverter.AlarmTripped.EventPriority |
67 |
| FrequencyConverter.AlarmTripped.EventFlags |
7 |
| FrequencyConverter.AlarmTripped.MoreText |
|
| FrequencyConverter.AlarmTripped.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter |
| FrequencyConverter.AlarmTripped.CtrlPosition |
1 |
| FrequencyConverter.AlarmTripped.LockAttribute |
1 |
| FrequencyConverter.AlarmWarning.DetectOn |
1 |
| FrequencyConverter.AlarmWarning.DetectText |
Frequency converter warning |
| FrequencyConverter.AlarmWarning.EventType |
64 |
| FrequencyConverter.AlarmWarning.EventPriority |
66 |
| FrequencyConverter.AlarmWarning.EventFlags |
7 |
| FrequencyConverter.AlarmWarning.MoreText |
|
| FrequencyConverter.AlarmWarning.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter |
| FrequencyConverter.AlarmWarning.CtrlPosition |
1 |
| FrequencyConverter.AlarmWarning.TimerTime |
5.000000e+00 |
| FrequencyConverter.AlarmWarning.LockAttribute |
1 |
| FrequencyConverter.AlarmError.DetectOn |
1 |
| FrequencyConverter.AlarmError.DetectText |
Frequency converter error |
| FrequencyConverter.AlarmError.EventType |
64 |
| FrequencyConverter.AlarmError.EventPriority |
67 |
| FrequencyConverter.AlarmError.EventFlags |
7 |
| FrequencyConverter.AlarmError.MoreText |
|
| FrequencyConverter.AlarmError.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter |
| FrequencyConverter.AlarmError.CtrlPosition |
1 |
| FrequencyConverter.AlarmError.LockAttribute |
1 |
| FrequencyConverter.AlarmConnection.DetectOn |
1 |
| FrequencyConverter.AlarmConnection.DetectText |
No connection |
| FrequencyConverter.AlarmConnection.EventType |
64 |
| FrequencyConverter.AlarmConnection.EventPriority |
67 |
| FrequencyConverter.AlarmConnection.EventFlags |
7 |
| FrequencyConverter.AlarmConnection.MoreText |
|
| FrequencyConverter.AlarmConnection.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter |
| FrequencyConverter.AlarmConnection.CtrlPosition |
1 |
| FrequencyConverter.AlarmConnection.TimerTime |
3.000000e+00 |
| FrequencyConverter.AlarmConnection.LockAttribute |
1 |
| FrequencyConverter.DefTrend |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter.PlotGroup |
| FrequencyConverter.TrendActSpeed.Multiple |
1 |
| FrequencyConverter.TrendActSpeed.DataName |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter.ActSpeed.Ac |
| FrequencyConverter.TrendActSpeed.StorageTime |
239 |
| FrequencyConverter.TrendActSpeed.BufferStatus[0] |
1 |
| FrequencyConverter.TrendActSpeed.BufferStatus[1] |
1 |
| FrequencyConverter.TrendActSpeed.NoOfBuffers |
2 |
| FrequencyConverter.TrendActSpeed.NoOfBufElement |
239 |
| FrequencyConverter.TrendRefSpeed.Multiple |
1 |
| FrequencyConverter.TrendRefSpeed.DataName |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter.RefSpeed.Ac |
| FrequencyConverter.TrendRefSpeed.StorageTime |
239 |
| FrequencyConverter.TrendRefSpeed.BufferStatus[0] |
1 |
| FrequencyConverter.TrendRefSpeed.BufferStatus[1] |
1 |
| FrequencyConverter.TrendRefSpeed.NoOfBuffers |
2 |
| FrequencyConverter.TrendRefSpeed.NoOfBufElement |
239 |
| FrequencyConverter.PlotGroup.YObjectName[0] |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter.TrendActSpe |
| FrequencyConverter.PlotGroup.YObjectName[1] |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter.TrendRefSpe |
| FrequencyConverter.PlotGroup.YUnit[1] |
% |
| FrequencyConverter.PlotGroup.YUnit[2] |
A |
| FrequencyConverter.PlotGroup.NumPoints |
478 |
| SafetySwitch.Alarm.DetectOn |
1 |
| SafetySwitch.Alarm.DetectText |
Safety switch is not on |
| SafetySwitch.Alarm.EventType |
64 |
| SafetySwitch.Alarm.EventPriority |
67 |
| SafetySwitch.Alarm.EventFlags |
7 |
| SafetySwitch.Alarm.MoreText |
|
| SafetySwitch.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.SafetySwitch |
| SafetySwitch.Alarm.CtrlPosition |
1 |
| SafetySwitch.Alarm.LockAttribute |
1 |
| Motor.GraphConfiguration |
2 |
| Motor.DisableTempSwitch |
1 |
| Motor.TempSwitch.Super.DisableSwitch |
1 |
| Motor.TempSwitch.Super.Alarm.DetectOn |
1 |
| Motor.TempSwitch.Super.Alarm.DetectText |
High motor temperature |
| Motor.TempSwitch.Super.Alarm.EventType |
64 |
| Motor.TempSwitch.Super.Alarm.EventPriority |
67 |
| Motor.TempSwitch.Super.Alarm.EventFlags |
7 |
| Motor.TempSwitch.Super.Alarm.MoreText |
|
| Motor.TempSwitch.Super.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Motor.TempSwitch |
| Motor.TempSwitch.Super.Alarm.CtrlPosition |
1 |
| Motor.TempSwitch.Super.Alarm.LockAttribute |
1 |
| Motor.DisableTempSensor |
1 |
| Motor.TempSensor.Super.DisableValue |
1 |
| Motor.TempSensor.Super.Value.Unit |
C |
| Motor.TempSensor.Super.Value.PresMaxLimit |
1.500000e+02 |
| Motor.TempSensor.Super.LimitHH.Alarm.DetectOn |
1 |
| Motor.TempSensor.Super.LimitHH.Alarm.DetectText |
High High motor temperature |
| Motor.TempSensor.Super.LimitHH.Alarm.EventType |
64 |
| Motor.TempSensor.Super.LimitHH.Alarm.EventPriority |
67 |
| Motor.TempSensor.Super.LimitHH.Alarm.EventFlags |
7 |
| Motor.TempSensor.Super.LimitHH.Alarm.MoreText |
|
| Motor.TempSensor.Super.LimitHH.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Motor.TempSensor |
| Motor.TempSensor.Super.LimitHH.Alarm.CtrlPosition |
1 |
| Motor.TempSensor.Super.LimitHH.Alarm.LockAttribute |
1 |
| Motor.TempSensor.Super.LimitHH.Limit |
1.300000e+02 |
| Motor.TempSensor.Super.LimitHH.Hysteres |
3.000000e+00 |
| Motor.TempSensor.Super.LimitHH.TimeDelay |
1.000000e+00 |
| Motor.TempSensor.Super.LimitHH.Used |
1 |
| Motor.TempSensor.Super.LimitH.Alarm.DetectOn |
1 |
| Motor.TempSensor.Super.LimitH.Alarm.DetectText |
High motor temperature |
| Motor.TempSensor.Super.LimitH.Alarm.EventType |
64 |
| Motor.TempSensor.Super.LimitH.Alarm.EventPriority |
66 |
| Motor.TempSensor.Super.LimitH.Alarm.EventFlags |
7 |
| Motor.TempSensor.Super.LimitH.Alarm.MoreText |
|
| Motor.TempSensor.Super.LimitH.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Motor.TempSensor |
| Motor.TempSensor.Super.LimitH.Alarm.CtrlPosition |
1 |
| Motor.TempSensor.Super.LimitH.Alarm.LockAttribute |
1 |
| Motor.TempSensor.Super.LimitH.Limit |
1.150000e+02 |
| Motor.TempSensor.Super.LimitH.Hysteres |
3.000000e+00 |
| Motor.TempSensor.Super.LimitH.TimeDelay |
1.000000e+00 |
| Motor.TempSensor.Super.LimitH.Used |
1 |
| Motor.TempSensor.Super.LimitL.Alarm.DetectText |
Temperature below Low limit |
| Motor.TempSensor.Super.LimitL.Alarm.EventType |
64 |
| Motor.TempSensor.Super.LimitL.Alarm.EventPriority |
66 |
| Motor.TempSensor.Super.LimitL.Alarm.EventFlags |
7 |
| Motor.TempSensor.Super.LimitL.Alarm.MoreText |
|
| Motor.TempSensor.Super.LimitL.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Motor.TempSensor |
| Motor.TempSensor.Super.LimitL.Alarm.CtrlPosition |
1 |
| Motor.TempSensor.Super.LimitL.Alarm.LockAttribute |
1 |
| Motor.TempSensor.Super.LimitLL.Alarm.DetectText |
Temperature below LowLow limit |
| Motor.TempSensor.Super.LimitLL.Alarm.EventType |
64 |
| Motor.TempSensor.Super.LimitLL.Alarm.EventPriority |
67 |
| Motor.TempSensor.Super.LimitLL.Alarm.EventFlags |
7 |
| Motor.TempSensor.Super.LimitLL.Alarm.MoreText |
|
| Motor.TempSensor.Super.LimitLL.Alarm.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Motor.TempSensor |
| Motor.TempSensor.Super.LimitLL.Alarm.CtrlPosition |
1 |
| Motor.TempSensor.Super.LimitLL.Alarm.LockAttribute |
1 |
| Motor.TempSensor.Super.Trend.Multiple |
1 |
| Motor.TempSensor.Super.Trend.DataName |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Motor.TempSensor.Super.Value.A |
| Motor.TempSensor.Super.Trend.StorageTime |
239 |
| Motor.TempSensor.Super.Trend.BufferStatus[0] |
1 |
| Motor.TempSensor.Super.Trend.BufferStatus[1] |
1 |
| Motor.TempSensor.Super.Trend.NoOfBuffers |
2 |
| Motor.TempSensor.Super.Trend.NoOfBufElement |
239 |
| Motor.TempSensor.Super.DefTrend |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.Motor.TempSensor.Super.Trend |
| Mode.AlarmNotReadyM.DetectOn |
1 |
| Mode.AlarmNotReadyM.DetectText |
Check interlocks. Manual start is not allowed, not ready |
| Mode.AlarmNotReadyM.EventType |
64 |
| Mode.AlarmNotReadyM.EventPriority |
66 |
| Mode.AlarmNotReadyM.EventFlags |
7 |
| Mode.AlarmNotReadyM.MoreText |
|
| Mode.AlarmNotReadyM.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| Mode.AlarmNotReadyM.CtrlPosition |
1 |
| Mode.AlarmNotReadyM.LockAttribute |
1 |
| Mode.AlarmNotReadyA.DetectOn |
1 |
| Mode.AlarmNotReadyA.DetectText |
Check interlocks. Automode is not allowed, not ready |
| Mode.AlarmNotReadyA.EventType |
64 |
| Mode.AlarmNotReadyA.EventPriority |
66 |
| Mode.AlarmNotReadyA.EventFlags |
7 |
| Mode.AlarmNotReadyA.MoreText |
|
| Mode.AlarmNotReadyA.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| Mode.AlarmNotReadyA.CtrlPosition |
1 |
| Mode.AlarmNotReadyA.LockAttribute |
1 |
| Mode.Alarm1LocalMod.DetectOn |
1 |
| Mode.Alarm1LocalMod.DetectText |
Local mode is activated, remote control is not allowed |
| Mode.Alarm1LocalMod.EventType |
64 |
| Mode.Alarm1LocalMod.EventPriority |
66 |
| Mode.Alarm1LocalMod.EventFlags |
7 |
| Mode.Alarm1LocalMod.MoreText |
|
| Mode.Alarm1LocalMod.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| Mode.Alarm1LocalMod.CtrlPosition |
1 |
| Mode.Alarm1LocalMod.LockAttribute |
1 |
| Mode.Alarm2LocalMod.DetectOn |
1 |
| Mode.Alarm2LocalMod.DetectText |
Local mode is activated |
| Mode.Alarm2LocalMod.EventType |
64 |
| Mode.Alarm2LocalMod.EventPriority |
66 |
| Mode.Alarm2LocalMod.EventFlags |
7 |
| Mode.Alarm2LocalMod.MoreText |
|
| Mode.Alarm2LocalMod.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| Mode.Alarm2LocalMod.CtrlPosition |
1 |
| Mode.Alarm2LocalMod.LockAttribute |
1 |
| Mode.AlarmNotManOrd.DetectOn |
1 |
| Mode.AlarmNotManOrd.DetectText |
Automode active. Manual start/stop order is not allowed |
| Mode.AlarmNotManOrd.EventType |
64 |
| Mode.AlarmNotManOrd.EventPriority |
66 |
| Mode.AlarmNotManOrd.EventFlags |
7 |
| Mode.AlarmNotManOrd.MoreText |
|
| Mode.AlarmNotManOrd.Attribute |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template |
| Mode.AlarmNotManOrd.CtrlPosition |
1 |
| Mode.AlarmNotManOrd.LockAttribute |
1 |
| DefTrend |
BaseComponent:Class-BaseFcPPO3MotorAggr-Template.FrequencyConverter.PlotGroup |
